2nd Quarter 2012
Farmers advanced through oxen, horses and mules, steam tractors and then tractors with internal combustion engines to provide power on farms. Tractors started to be a competitive source of power in the early 20th century as progress moved from steam to internal combustion engines and steel to rubber tires. Early reapers and binders were forerunners of stationary threshing machines and mobile combines or mechanical harvesters for grain, beans and cotton, which became available over 1930-1960s. However, mechanical harvesting of fruits and vegetables generally lagged behind. The invention and later adoption of the self-propelled processed tomato harvester in the mid-60s was a major labor-saving factor for that industry; later related inventions yielded further labor-saving and product quality improvements. Mechanical harvesters have been developed for some other fruit and vegetables, although much of the industry still relies on hand harvesting. Even without mechanical harvesting, labor aids, which improve labor productivity instead of replacing labor, have made the harvesting process faster and with less stress on workers’ backs. Calvin and Martin (2010) report an estimate from 2000 that 75% of vegetables and melons are harvested by machine and 55% of fruit production, with processing products being more likely mechanically harvested than fresh.
For decades, U.S. growers have drawn upon illegal and legal workers from Mexico for planting and harvesting labor in these crops. Over time, mechanization, modification of production practices, and improved management practices have been central to reducing labor requirements for growing and harvesting fruits and vegetables. Still, labor makes up 42% of the variable production expenses for U.S. fruit and vegetable farms, although labor’s share varies’ significantly depending on the characteristics of the commodity and whether the harvest is mechanized. In a global economy with produce imports from countries with low wages, U.S. growers are anxious to reduce their labor costs.
This paper provides a description of important steps in the mechanization of U.S. fruit and vegetable harvesting, which can be hard, backbreaking work and, in addition, the risk of falling is significant for hand-harvesting of tree fruit from ladders. Consumers demand fresh market produce with minimal blemishes, bruises or damage. This eliminates the option of mechanical harvesting, with current technology, for many products. However, a small amount of damage in harvesting is permitted for fruits and vegetables destined for processing, and mechanical harvesting can sometimes bring major cost savings. Switching to mechanical harvesting frequently requires transformation of a farming operation—new crop varieties, new field configurations, and new packing processes. In addition, a significant capital outlay is frequently required. Several photographs are included with this article as an aide to visualizing mechanical harvesting technologies.
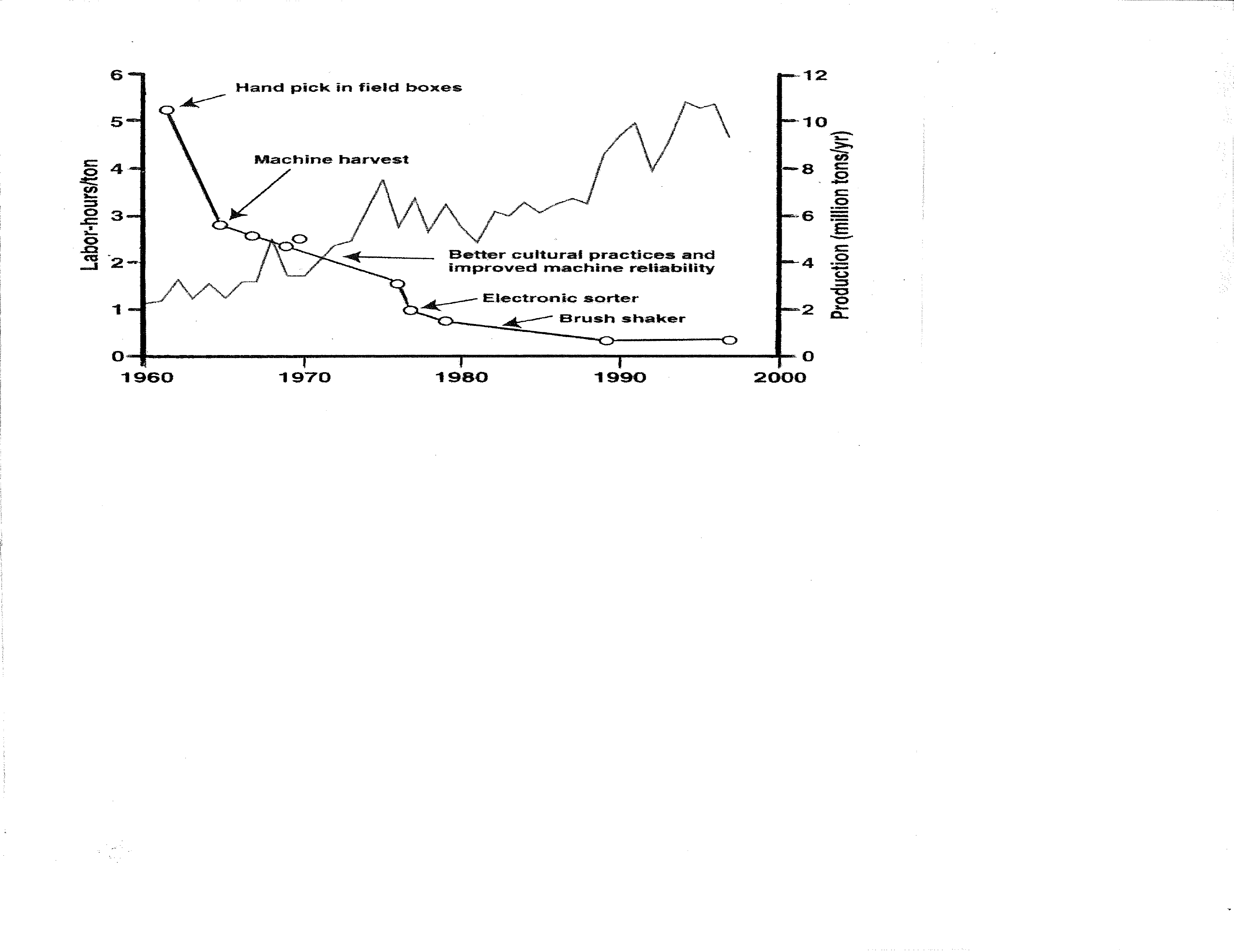
The most storied success in mechanical fruit and vegetable harvesters is the self-propelled Johnson Tomato Harvester in California. Research and development to mechanize harvesting of processing tomatoes in California was spurred by the anticipated end of the Bracero Program in 1964. This program had provided a opportunity for Mexicans to obtain a permits to work in the Untied States, and as the program ended, the supply of tomato harvesting labor was significantly reduced. In the 1950s, 5.3 hours of harvesting labor was required per ton of processed tomatoes (Figure 1). In 1950, Jack Hanna, Department of Vegetable Crops, and Coby Lorenzen, of the Department of Agricultural Engineering, both at UC Davis, began development of a system for mechanically harvesting processing tomatoes. Hanna began breeding a tomato that could withstand the stress of mechanical handling, would ripen uniformly and would detach from the plant during machine harvesting. Lorenzen worked on a harvesting machine to harvest tomatoes. In the late 1950s, another UC Davis agricultural engineer developed a fruit-vine separator for Lorenzen’s harvester. By 1960, the University of California had obtained a patent for the new tomato variety, and the Blackwelder Manufacturing Company, Rio Vista, California, undertook manufacturing and selling the first mechanical tomato harvesters.
This early mechanical tomato harvester cut the tomato plants at soil level and lifted them up into a shaking mechanism that separated the fruit from the vines. Twelve workers rode on the early machines to sort the fruit, remove green or blemished tomatoes and clods of dirt, requiring 2.9 hours of harvesting labor per ton of fruit--a 60% reduction from hand harvesting. The tomatoes are conveyed directly into pallet bins that are transported on a trailer pulled beside the harvester (Thompson and Blank 2000).

In 1964, 75 harvesters were sold in California and in 1965, 250 were sold, yielding a combined capacity to harvest roughly 25% of the tomato crop. In five years, 95% of the total California processing tomato crop was harvested by mechanical harvesters , a major social gain (Schmitz and Seckler 1970). In the mid-1970s, a further major technical advance occurred with the invention of high-speed electronic color sorters incorporated into the harvester, which identified ripe tomatoes and used blasts of air to separate the ripe fruit from green and rotten fruit and clumps of dirt. With improved leveling and ridging of tomato fields, new tomato varieties and a new shaker innovation, labor requirements were reduced from 12 to 2-4 hand sorters per machine or to 0.4 hour of harvesting labor per ton (Figure 2). Over 35 years, this dominant California technology has reduced labor requirements per ton of California processing tomatoes by 92% (Figure 1).
Current models of the Johnson self-propelled tomato harvester (Figure 2), sold by the California Tomato Machinery Company, are equipped with two 32-channel high-speed color and dirt sorters and use 2-4 hand sorters costing roughly $450,000 with a life of 15-20 years with intensive post-harvest maintenance. They have a maximum capacity of 70 tons per hour and regularly are operated in two 10-hours shifts. Total harvesting costs are about $28 per ton. Under this new technology, yield per acre for California processing tomatoes has increased and total production has increased from 3 million tons—69% of total U.S. tonnage —in 1965 to about 12 million tons in 2010 (96% of total U.S. tonnage).
The Pik Rite Company is a leader for inventing and manufacturing tractor drawn harvesters for small-scale fruit and vegetable harvesting in the U.S. Midwest and East. The founder of the company built his first mechanical tomato harvester in 1983, and after three years of improving and testing, sales began in 1986.
The Model 190 is a low capacity, 30 to 40 ton per hour, tractor-drawn harvesting machine with a lateral rotating single-brush-shaker system. This machine has high-speed optical color sorters with blasts of air as an aid to the separation of ripe tomatoes from green ones and chunks of dirt. The cost of this machine is $150,000-$160,000 and has a work life of 12-15 years. The Pik Rite tomato harvester is used in Indiana, Michigan, Ohio and Pennsylvania, where harvesting costs are roughly $48 per ton, substantially higher than the $28 per ton costs in California.
Pik Rite also develops and markets tractor drawn mechanical harvesters for processing cucumbers, carrots and peppers. The cucumber harvester has a special dirt removal system that uses blasts of air along with a “scrubber” belt to remove trash. It also has nonpinch conveyor chains spaced so small and medium-sized cucumbers are saved and elevated to a storage bin, but oversized fruit exit with the vines into the field for better harvesting efficiency. This separation process is aided by blasts of air blowing the vines and chaff upward and out of the rear of the machine. This machine can unload its 125 bushel collecting bin in 20 seconds.

In Florida, oranges are grown for processing into orange juice. Hand harvesting still dominates but growers have experimented with several mechanical harvesters. These trees are hand-picked by workers on ladders with a bag, and when the bags are filled, the worker transfers the fruit to large metal box on the ground. This is hard, dangerous work.
Several companies have manufactured tree-fruit harvesters for Florida citrus growers. They include Coe -Collier, OXBO, and Koran, which have supplied canopy-shaking and trunk -shaking technologies. Oranges are difficult to harvest mechanically because they remain firmly attached to the tree when ripe so both types of mechanical harvesting systems can cause significant tree damage; either to tree branches or tree trunks. The canopy-shaking technology has two variations: one allows the fruit to fall to the ground where it is then picked up by workers or machines. The other variation is a two-part motorized machine with one part gripping the tree trunk for shaking and the second being a matching sloping table to aid with catching the falling fruit (Figure 3). The harvested fruit are conveyed into boxes.
In an attempt to reduce tree damage in harvesting oranges, the University of Florida has experimented with fruit loosening agents—abscission compounds. When applied, this chemical loosens the stems so the ripe oranges are more easily dislodged, which reduces damage from mechanical harvesting. However, mechanical harvesting of late-season Valencia oranges poses an additional problem in that the trees at that time contain mature fruit that is ready for harvest and the young crop of oranges that will mature in the next season. A successful abscission chemical needs to selectively loosen only the mature fruit, leaving the young crop unaffected. The abscission compound has not yet been approved by the U.S. Environmental Protection Agency, which has made mechanical harvesting less attractive. In addition, the arrival in Florida of the disease known as citrus greening which kills orange trees has also reduced interest in mechanical harvesting. When trees are unhealthy, growers are more reluctant to add the additional stress of mechanical harvesting. However, the main current form of mechanical harvesting is the trunk-shake and catch method (Figure 3), but without an approved loosening agent for oranges, mechanical harvesting of oranges peaked at about 7% of the harvested acreage in the 2008/09 season and then declined. In California processed plum harvesting, a similar trunk-shaking harvester is being widely used successfully. Ripe plums detach more easily and reduce tree damage with mechanical harvesting.

Mechanical harvesters for processing tart cherries have been successful in Michigan. The machine is of a shake-and-catch type. This is a two-part self-propelled unit that is a lighter version of the harvester used for Florida oranges (Figure 3). Ripe tart cherries bruise some in this harvesting system, but since the cherries are going immediately for processing, the damage has not been viewed as significant. A large share of Michigan sour cherries are now harvested with this type of mechanical harvester.
For a large share of California wine grapes, mechanical harvesters are now used. These machines are a relatively tall self-propelled unit that straddles the trellised grapevine rows. The harvester has rotating arms that dislodge the fruit that is then caught on a table and conveyed into a wagon. See the machine by Korvan (Figure 4).
Korvan also manufactures and sells a mechanical berry picker for processing berries—largely for raspberries and blueberries. This machine is self-propelled and surrounds the row of berry bushes similar to the wine grape harvester. It does some damage to the fruit, but since it is going immediately for processing, this is not a serious problem.
A little experimentation has been done with robotic harvesters that use GPS to scout fruit location and then to pick fruit. However, electronic assessment of tree fruit is complicated by the fact that tree limbs and unripe fruit may block the view of the electronic eyes.
The potato is a large volume crop where mechanical harvesters were first invented almost 100 years ago. Although simple mechanical potato diggers existed in the early 1900, the first complete harvester-separator machines did not exist until the 1950s. Incremental innovations over time have transformed these machines into the modern self-propelled mechanical potato harvester. Today’s machines scoop up the potato plant and soil beneath it. This material is elevated up a rotating apron-chain consisting of steel links several feet wide, which allows lose dirt to fall away while retaining the potatoes. The chain deposits this mixture into an area where further separation occurs. The most complex designs use vine choppers and shakers, electronic sorters along with a blower system to separate good potatoes from rotten potatoes, stones, dirt and vines. Potatoes are deposited into a trailing wagon or truck. These potatoes are used for both the fresh and processing markets.
Other mechanical harvesters for fresh fruits and vegetables are largely experimental. Fresh-market California iceberg lettuce, melons, strawberries and tomatoes have substantial harvesting costs and labor aids have reduced the workload. For example, with iceberg lettuce, the head is cut by hand and trimmed, then laid on a table that conveys it to the center where workers on the wagon field wrap it in plastic and place 32-heads per box, which are then stacked on the wagon. This process has significantly reduced the cost of harvesting and packing iceberg lettuce. A similar process is applied to melons and cantaloupe, except they are packed directly into boxes without plastic wrap. The hand-harvesting cost of fresh-market California strawberries is very high, about $615 per ton, for this high-value delicate crop, which grows close to the ground and does not ripen uniformly. Some California growers use conveyor belts as a labor aid to improve worker productivity.

Washington State University and USDA-ARS scientists have developed an experimental mechanical harvester for fresh market sweet cherries and apples (Peterson 2005); this machine harvests the sweet cherries without their stems. A chemical fruit-loosening agent (abscission) is first applied to the trees a few days before harvesting. The mechanical harvester is a two-part self-propelled machine with each part going on opposite sides of the trees. Cushioned catcher pans on each unit are used to seal around the trunk and connect the two units. The harvester has a high density rubber arm on each unit that bumps the tree branches, and this energy dislodges the ripe fruit (see Figure 5). Both harvesting units have inclined catchment tables, but the mechanical conveyors are covered with a soft spongy material that reduces impact and the padded conveyers move the fruit gently to the outer top side of each of the machines catching tables. As the fruit rolls over the table a fan blows away leaves and trash, and the fruit passes to two slowly rotating modest sized storage bins or boxes.
A benefit to growers and consumers is that mechanically harvested cherries have less bruising or damage than hand-harvested fruit and reduced exposure to bacteria-laden human hands. Sweet cherry consumers are accustomed to their cherries having stems, but research has shown that consumers can make the transition to stemless sweet cherries. For mechanically harvesting sweet cherries and apples, a special tree architecture is needed—short with a “Y” shape, opposed to the 20-25 feet tall conventional trees (see Figure 5). The mechanical sweet cherry harvester has excellent long-term potential for harvesting high quality sweet cherries for the fresh market at an 80-90% reduction in harvest labor costs with less damage than hand-harvested cherries (Whiting 2006).
The new experimental BEI Black Ice Harvester works with delicate fresh-market bush berries—raspberries, blackberries and blueberries. The Black Ice Harvester uses jets of air to create a turbulent local environment within the machine and around the berry bushes, which then gently dislodge those that are ripe. The machine has padded walls, and the berries fall onto a bed or table (the Centipede Scale catching frame) and then are gently conveyed to one pound or smaller containers that are carried on the machine. A major advantage of this machine is that berries and bushes are not touched by a picking or rotating-arm mechanism. This helps minimize damage to ripe berries and scarring of the bushes. With the minimal plant damage by the harvester, the machine can be used to make multiple passes over the same bushes as the berries ripen at different dates. With this machine, fruit quality meets or exceeds that of hand-harvested, and since no human handing of the fruit is required in the harvesting and packing, there are reduced food safety concerns. The machine is being farm tested. Its estimated cost is $150,000 for the smaller model and $200,000 for a larger model.
As in the past, future mechanization of additional crops will be driven largely by benefit-cost considerations, including the likely future international competitiveness of the U.S. industry. Relatively good machines exist for mechanically harvesting many fruits and vegetables for processing.The most exciting development is that there are new and effective harvesters that are in the final stages of testing for fresh market berries, and for sweet cherries. These technologies would move forward rapidly if there is a sudden increase in the cost of harvesting labor or uncertainly of availability of this type of labor. Furthermore, these machines have potential for other crops. However, a short-term hurdle is that some crops are declining in acreage because of changing demand and international competition. Also, some old orchard and vineyard architectures are not compatible with the new harvesting systems. When the future prospects are good, orchards can be replaced with shorter and trellised trees and vines. Uniform ripening of fruit and berries is critical to the success of some of these new harvesting systems.
Calvin, L. and Martin, P.L. (2010). The U.S. produce industry and labor: Facing the future in a global economy. USDA, ERS Economic Research Report No. 106, Nov. .
Huffman, W.E. (2012). The status of labor-saving mechanization in U.S. fruit and vegetable harvesting. Iowa State University, Department of Economics Working Paper #12009, May.
Peterson, D.L. (2005). Harvest mechanization progress and prospects for fresh market quality deciduous tree fruits. Hortechnology 15, 72-75.
Schmitz, A. and Seckler, D. (1970). Mechanized agriculture and social welfare: The case of the tomato harvester. American Journal of Agricultural Economics 52:569-577.
Thompson, J.F. and Blank, S.C. (2000). Harvest mechanization helps agriculture remain competitive. California Agriculture, May-June.
Whiting, M. (2006). Mechanical harvesting of sweet cherries. Resource, American Society of Agricultural Engineers, Oct.

