Farm labor shortages and increasing costs represent significant challenges to specialty crop production. Fruit production in particular involves numerous labor-intensive tasks that must be carried out within a limited time. Fruit growers rely heavily on a diminishing workforce of migrant workers and a smaller number of temporary, H-2A guest workers (Devadoss and Luckstead, 2008; Devadoss and Luckstead, 2018; Devadoss and Luckstead, 2019). However, bureaucracy, unnecessary delays, and higher costs make it difficult for farmers to rely on the H-2A program (Luckstead and Devadoss, 2019; Devadoss, 2021). As a result, fruit growers are in dire need of labor-saving technologies to mechanize labor-intensive operations such as pruning, thinning, and harvesting.
Researchers and farmers have developed and adopted machine-friendly orchard architectures that feature tall and narrow tree canopies supported by trellis systems that are planted in high-densities (i.e., fruit wall canopy architectures). Such orchard architectures make it easier for machines—and humans—to access the limbs, flowers, and fruits in tree canopies. The orchard management strategies to create these architectures were discussed in Vougioukas et al. (2025). These fruiting-wall architectures support automation, but they also increase labor demand for tree training and pruning, thus increasing the overall labor use. To address these challenges, active research and development activities are in progress to automate pruning, thinning, and harvesting. This article focuses on the current status of automation in pruning and thinning fruit trees.
Each year, a proportion of branches in fruit trees are removed to improve overall tree health and productivity. The selection of branches is dictated by spacing between branches, age, length, diameter (size), and branches’ health and productivity. Selective removal of branches encourages new growth of more productive branches, increases airflow, and reduces the number of fruiting sites for a more optimal crop load. Pruning also helps improve the distribution of fruiting sites over the entire canopy to maximize fruit yield and quality. Increasingly, improved accessibility to canopy parts such as blossom and fruit is considered a factor influencing the pruning decision since it simplifies the development of robotic machines for downstream operations such as blossom thinning and harvesting. For example, removing fruiting branches that are growing straight into or out of the canopies and those growing next to trunks, trellis wires, and trellis posts helps improve the performance of robotic harvesting systems.
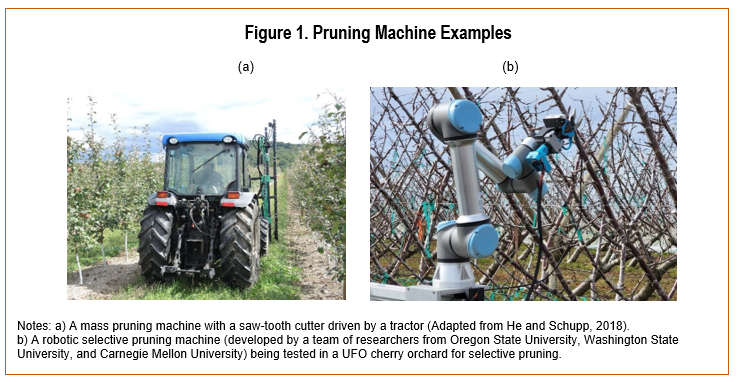
The overwhelming majority of fruit tree pruning is performed manually. To minimize the dependence on labor, tree-hedging machines have been adopted by some growers in the United States and elsewhere (see Figure 1a). These mass—nonselective—pruning machines have often been used to remove long branches in modern fruiting-wall orchards (see Figure 1b). Mechanical mass-pruning is often followed by manual pruning to selectively remove unwanted branches. Some growers have also used machine and manual pruning in alternate years, as a strategy to reduce overall cost and achieve some level of precision in pruning. The overall benefit of using these machines, however, is marginal to nonexistent (Mika, Buler, and Treder, 2016). Consequently, commercial adoption of mass-pruning machines has stagnated.
Automated or robotic technologies offer a promising alternative to manual pruning. Recognizing this opportunity, researchers have developed perception systems and prototype robots for fruit tree pruning over the last two decades. The first step is to use a three-dimensional (3D) sensor (e.g., a laser scanner or a 3D camera) to capture points on the surface of dormant trees and then use these points to create a geometric model of the trunk and branches (Livny et al., 2010; Tabb, 2013; Elfiky et al., 2015; Akbar, Elfiky, and Kak, 2016; Medeiros et al., 2017). The second step is to use the generated geometric models and existing horticultural knowledge/pruning rules to calculate the positions of the pruning points and execute the cuts using a robotic arm and tool (e.g., Karkee et al., 2014).
The 3D imaging and model generation techniques have shown great promise but are often challenged by variable lighting conditions, changing and variable backgrounds, and the type and size of tree trunks and branches.
To address those challenges, deep-learning-based approaches have been proposed in recent years, with more promising results for the reconstruction of fruit trees and its use in developing pruning rules and manipulating robots. For example, Borrenpohl and Karkee (2023) developed an instant-segmentation model using Mask R-CNN (a deep learning network) to detect trunk and primary branches in upright fruiting offshoot (UFO) cherry orchards.
In recent years, integrated robotic systems have been developed and tested in field environments by utilizing the latest perception techniques and various types of manipulator (arm) and end-effector (hand) technologies. A team of researchers at Pennsylvania State University has been developing a Cartesian manipulator-based robot to prune apple trees in fruiting-wall orchards (Zahid et al., 2020). This team demonstrated that a custom-built manipulator and end-effector could prune apple tree branches up to 25 millimeters in diameter with varying branch orientations. Similarly, a team of researchers from Oregon State University, Washington State University, and Carnegie Mellon University has been developing and evaluating prototype robotic systems for apple and cherry tree pruning. This prototype was first tested in February 2022 in a research orchard at Washington State University (You et al., 2022; Figure 2b). This robotic system utilized a deep-learning-based perception system to recreate 3D structure of canopies, tree pruning strategies learned from experts (includinghorticulturists and growers) to determine the cutting points, and a scissor (as an end-effector) attached to a commercial robot arm (UR5, Universal Robotics). The first field evaluation showed a pruning success rate of 58% in a modern UFO orchard.
Though numerous research teams have been working on robotic pruning, none of the prototypes have been commercialized yet. The main reasons are inadequate speed, accuracy, and robustness, while factors such as cost and complexity are also important. Researchers are investigating methods to learn pruning strategies and rules from human workers and develop human-robot-canopy interaction and collaboration techniques to address these challenges.
Tree fruit crops such as apples and cherries often exhibit over-cropping (i.e., they produce more flowers and set more fruit than needed). Over-cropping leads to smaller fruit size, diminished color, lower sugar content, depleted tree carbohydrate reserves, and negative effects on canopy health and productivity, including reduced return bloom (flower density in the following year) due to competition among fruits. Managing crop load is achieved by blossom and green fruit (or fruitlet) thinning. The target is to find a balance between reducing the number of fruits per tree and achieving satisfactory yield, quality, and return bloom (Robinson, Lakso, and Greene, 2014). While some fruitlet thinning occurs naturally, additional thinning during bloom and early fruit growth stages is essential to achieve desired levels of thinning. Flower and fruitlet thinning can also reduce fruit clustering, improve the uniformity of fruit distribution, and remove fruit from difficult-to-reach locations (e.g., behind trellis wires), thus improving the efficiency of robotic harvesting (as discussed in Vougioukas et al., 2025).
As discussed previously, blossom thinning is an important method to decrease fruit set, enhance fruit quality, and encourage return bloom in the subsequent year. Blossom thinning is currently performed manually, chemically, or mechanically.
Manual blossom thinning, typically done when the blooms are in the “popcorn” stage (before they open fully), effectively reduces heavy bloom. However, it is labor-intensive and costly and is practiced primarily on high-value cultivars, when higher returns can compensate for the increased cost.
Chemical blossom thinning is typically conducted using an air-blast sprayer during the bloom and post-bloom stages. Bloom thinners attempt to damage flowers and their parts, inducing stress in the plant and helping reduce the fruit set. A combination of lime sulfur and fish oil, carbaryl, and ammonium thiosulfate are common materials sprayed for the chemical thinning of apples and cherries (e.g., Miller and Tworkoski, 2010). The efficacy of chemical thinning varies significantly depending on the chemical used, tree age, bloom density, foliage condition, tree carbohydrate supply, and weather parameters such as temperature and humidity (Robinson, Lakso, and Greene, 2014). Recent advancements and commercialization of precision chemical application systems, such as the one from Robotics Plus (Bethlehem, New Zealand), offer the potential for improved efficiency in targeting blossoms with thinning agents. However, the challenge of variable thinning efficiency remains.
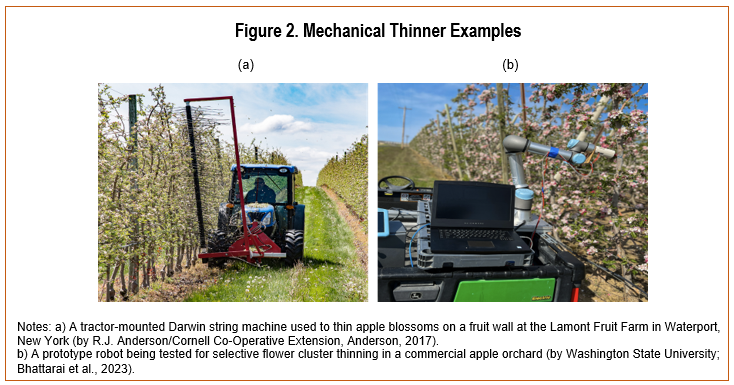
Mechanical thinning devices include string thinners (handheld or tractor-mounted) that involve rotating strings to strike the tree branches with excess flowers. Figure 2a shows Darwin Thinner, a tractor-pulled machine (Deggenhausertal, Germany). The timing and intensity of thinning operations are two critical elements for achieving optimal results with mechanical thinners. Handheld devices offer more precision and control but are labor-intensive. Tractor-mounted thinners provide greater efficiency and cost benefits in large-scale operations (27-33% faster; Schupp and Kon, 2014) over handheld devices. However, mechanical thinning can cause physical damage to the tree limbs and fruiting spurs, does not apply to unstructured bushy tree architectures, and does not provide the capability for targeted and selective thinning (Zhang, Xi, and Chen Du, 2018). Recent advancements in automating mechanical thinning systems will be discussed later.
Fruitlet thinning is performed manually or using a shaking machine. Shaking machines such as the USDA double-spiked drum shaker vibrate branches to remove a portion of fruitlets. Like blossom thinning, mechanical fruitlet thinning that is not selective may cause damage to canopy parts and is not highly consistent. In contrast, manual thinning is highly selective but also labor-intensive and costly. New research and development in robotic approaches show promise for selective mechanical fruitlet thinning.
Mechanical thinners lack the desired precision and therefore have not been adopted widely. As an alternative, researchers have been investigating robotic systems for blossom and fruitlet thinning. Similarly to robotic pruning, a perception system detects and localizes flowers and estimates flower density, and a specifically designed thinning end-effector or tool executes the thinning. Lyons et al. (2015) integrated machine vision with a commercial thinner (the Darwin) for blossom thinning. Others have developed deep-learning perception algorithms used in combination with custom robot arms and tools or commercial arms for blossom thinning (e.g., Bhattarai, Zhang, and Karkee, 2023, Figure 2b). Achieving adequate efficiency and speed is a significant challenge for robotic thinning. Engineers work on perception, robot design, and control to address these challenges. Bhattarai, Zhang, and Karkee (2023) reported up to 60% flower removal with a 6-second cycle time (time taken per flower cluster). However, better performance is required if robots are to be used for commercial thinning.Perception is one of the most critical components of a robotic thinning system. As flowers and fruitlets occupy a tiny area in the images, (Bhattarai, Zhang, and Karkee, 2023) reported higher detection accuracy of flower clusters when canopies were imaged from a distance of 0.5 meters compared to when imaged from a distance 1 meter. Increased image resolution, however, adds a computational burden. Researchers are working on the speed/accuracy trade-off to find an optimal solution. For an effective and efficient movement of thinning tools in and around tree canopies, various canopy parts such as branches, tree trunks, leaves, and trellis wires need to be detected to avoid obstacles while reaching the target blossom or fruitlet for thinning. More studies are being conducted around the world to detect various canopy parts and determine the hardness of these obstacles. In addition, researchers are focusing on developing more effective thinning hands or tools to improve the practical adoption of robotic solutions for crop thinning.
Finding adequate workers to perform labor-sensitive tasks has become increasingly more challenging for fruit growers. Successful development of cost-efficient robots to prune and thin fruit trees will help growers mitigate their reliance on farm workers. Researchers have been developing and testing AI-empowered machine vision and robotic machines for pruning and thinning tree fruit crops. However, wider commercial adoption of these techniques is yet to be realized.
For More Information
Akbar, S.A., N.M. Elfiky, and A. Kak. 2016. “A Novel Framework for Modeling Dormant Apple Trees Using Single Depth Image for Robotic Pruning Application.” Paper presented at the IEEE International Conference on Robotics and Automation (ICRA), pp. 5136–5142.
Anderson, R.J. 2017. “Cornell Extension, New York state apple growers partner on innovation.” Cornell Co-Operative Extension. https://fruitgrowersnews.com/news/cornell-extension-new-york-state-apple-growers-partner-innovation/ [Accessed February 26, 2025].
Bhattarai, U., Q. Zhang, and M. Karkee. 2023. “Design, Integration, and Field Evaluation of a Robotic Blossom Thinning System for Tree Fruit Crops.” Journal of Field Robotics 41(5): 1366-1385
Borrenpohl, D., and M. Karkee. 2023. “Automated Pruning Decisions in Dormant Sweet Cherry Canopies Using Instance Segmentation.” Computers and Electronics in Agriculture 207: 107716.
Devadoss, S., 2021. “Theme Overview: Trends and Challenges in Fruit and Tree Nut Sectors.” Choices 36(2):1–3.
Devadoss, S., and J. Luckstead. 2008. “Contribution of Immigrant Farm Workers to California Vegetable Production.” Journal of Agricultural and Applied Economics 40(3):879–894.
———. 2018. “U.S. Immigration Policies and Dynamics of Cross-Border Workforce in Agriculture.” World Economy 41(9):2389–2413.
———. 2019. “Theme Overview: The Role of Guest Workers in U.S. Agriculture.” Choices 34(1): 1–3.
Elfiky, N.M., S.A. Akbar, J. Sun, J. Park, and A. Kak. 2015. “Automation of Dormant Pruning in Specialty Crop Production: An Adaptive Framework for Automatic Reconstruction and Modeling of Apple Trees.” In Computer Vision and Pattern Recognition Workshops (CVPRW), 2015 IEEE Conference. IEEE, pp. 65–73.
He, L., and J. Schupp. 2018. “Sensing and Automation in Pruning of AppleTrees: A Review.” Agronomy 8(10): 211.
Karkee, M., B. Adhikari, S. Amatya, and Q. Zhang. 2014. “Identification of Pruning Branches in Tall Spindle Apple Trees for Automated Pruning.” Computers and Electronics in Agriculture 103:127–135.
Livny, Y., F. Yan, M. Olson, B. Chen, H. Zhang, and J. El-Sana. 2010. “Automatic Reconstruction of Tree Skeletal Structures from Point Clouds.” In ACM SIGGRAPH Asia 2010 papers, pp. 1–8.
Luckstead, J., and S. Devadoss. 2019. “The Importance of H-2A Guest Workers in Agriculture.” Choices 34(1):4–11.
Lyons, D., P.H. Heinemann, J.R. Schupp, T.A. Baugher, and J. Liu. 2015. “Development of a Selective Automated Blossom Thinning System for Peaches.” Transactions of the ASABE 58(6):1447–1457.
Medeiros, H., D. Kim, J. Sun, H. Seshadri, S. A. Akbar, N.M. Elfiky, and J. Park. 2017. “Modeling Dormant Fruit Trees for Agricultural Automation.” Journal of Field Robotics 34(7):1203–1224.
Mika, A., Z. Buler, and W. Treder. 2016. “Mechanical Pruning of Apple Trees as an Alternative to Manual Pruning.” Acta Scientiarum Polonorum Hortorum Cultus 15(1):113–121.
Miller, S. S., and T. Tworkoski. 2010. “Blossom Thinning in Apple and Peach with an Essential Oil.” HortScience 45(8):1218–1225.
Robinson, T., A. Lakso, and D. Greene. 2014. “Precision Crop Load Management: The Practical Implementation of Physiological Models.” International Symposium on Physiological Principles and Their Application to Fruit Production 1177: 381–390.
Schupp, J.R., and T.M. Kon. 2014. “Mechanical Blossom Thinning of ‘Goldrush’/m. 9 Apple Trees with Two String Types and Two Timings.” Journal of the American Pomological Society 68(1):24–32.
Tabb, A. 2013. “Shape from Silhouette Probability Maps: Reconstruction of Thin Objects in the Presence of Silhouette Extraction and Calibration Error.” In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 161–168.
Vougiokas, S., M. Karkee, S. Devadoss, R.K. Gallardo, and D. Charlton. 2025. “Mechanization Efforts in Fruit Harvesting.” Choices 40(1):1-8.
You, A., N. Parayil, J.G. Krishna, U. Bhattarai, R. Sapkota, D. Ahmed, M. Whiting, M. Karkee, C.M. Grimm, and J. R. Davidson. 2022. “An Autonomous Robot for Pruning Modern, Planar Fruit Trees.” arXiv preprint 2206.07201.
Zahid, A., M.S. Mahmud, L. He, D. Choi, P. Heinemann, and J. Schupp. 2020. “Development of an Integrated 3R End-Effector with a Cartesian Manipulator for Pruning Apple Trees.” Computers and Electronics in Agriculture 179:105837.
Zhang, C., Z.C. Xi, and C.D. Chen Du. 2018. “Precise Crop Load Management.” In Q. Zhang (ed.), Automation in Tree Fruit Production: Principles and Practice. CABI, pp. 161–178.

